







互联网药品信息证书编号:(苏)-经营性-2020-0005 增值电信业务经营许可证编号:
苏B2-20150023 Copyright ©南京瑞凡科技发展有限公司 2003-2026 qxw18.com All Rights Reserved 律师支持:北京易欧阳光律师事务所
添加客服微信
为您精准推荐

产品说明:原理根据旋转干扰电场理论及临床实际情况,按最优化方式设置多组治疗模式,由计算机芯片自动控制,其治疗深入患处深部,在骨伤端

产品说明:德国卡特臭氧治疗仪厂家直销产品说明:【卡特臭氧治疗仪设备技术特点】:1.该医用臭氧系列仪器由德国原装进口,采用世界上最先进

产品说明:

产品说明:参数:踝固定脚板有效行程:脚曲度0°~100°(脚背曲度40°,脚底曲度60°),内外翻0°~60°(内翻40°,外翻20°)运动速度:0

产品说明:参数:上肢固定架活动范围:前屈、后伸位0°~270°,外展、内收位0°~270°,内旋、外旋位0°~180°运动速度:0°~8°/S作用:改

产品说明:前臂支架长度:250~390mm作用:用于持续性肘关节牵引,适用于肘关节屈伸活动障碍患者。

产品说明:154×60×142cm,坐垫前后调节范围0~23cm,阻尼调节档数8,额定载荷,靠背垫70kg,坐垫135kg。

产品说明:由合成革、粘扣、松紧带、钢条组成;适用于各种腰痛病症,腰部手术后的束紧和固定,此产品有使用方便配戴简单等优点。作用:腰部

产品说明: 产品概述:产后康复治疗仪是一种以妇产科治疗为主的产品,通过专用治疗片对人体特定部位(体表及耳穴)进行低频脉冲刺激,而产生低...
产品说明:主要有两个模式:CPM模式、主动模式
产品说明: 产品描述为患者提供了一个下肢康复训练的工作站,能准确模拟正常人步态。突破性提供了早期卧床步态训练,包含完整步态周期的闭链运...

产品说明:推车式、触摸屏高端大气上档次。适用范围:I型、II型糖尿病及糖耐量异常等各类糖尿病症以及糖尿病引起的并发症。对常见病如:四

产品说明: 纬度医械是一家大型的医疗器械公司,集研发,生产,销售于一体,自主研发生产的产后康复治疗仪采用低频调制电流,保留低频电

产品说明: 产后康复现在还是比较流行的,现在大家的生活条件好了,对产妇的身体更加重视。特别是产妇们,她们自身能够感受到生产带来的

产品说明:产后康复治疗仪采用低频调制脉冲原理,通过导电电极片作用于人体需要治疗的部位,通过电脉冲的刺激使肌肉产生松弛、紧张的的运动

产品说明:电磁康复仪以中医内病外治为理论依据,根据中医学原理和现代医学分子生物学、量子医学理论,采用先进的电子技术,设计出一种符合

产品说明:1、髋、膝、步行训练台采用五轴联动技术,步行训练台始终与患者的髋膝关节运动速度适时匹配,无级变速。步行训练的安全性;2、通

产品说明:1. 通过振动刺激人体神经肌肉系统产生不随意的运动,是许多潜在(不参与收缩)的肌纤维参与收缩,从而产生较大的力量。2. 内置高

产品说明:1、振动频率可调范围:3~50Hz;2、振动频率误差:允许误差±10%;3、振动强度可调范围:10%~100%;4、振幅:≤6mm。5、定时时间在

产品说明:振动训练的原理1.振动刺激能刺激肌肉的本体感受器,尤其是改变肌酸传入纤维末梢的兴奋性。2.震动提供不稳定的平面或者环境来提高

产品说明:冲击波是一种通过物理学机制介质(空气或液体)传导的机械性脉冲压强波,它通过改变伤患处的化学环境、破坏疼痛受体的细胞膜、诱

产品说明:产品介绍:产后康复治疗仪,是运用现代科技手段,结合古中医经络学理论,采用的多功能、多波形组合模式,通过专用电极片对女性特

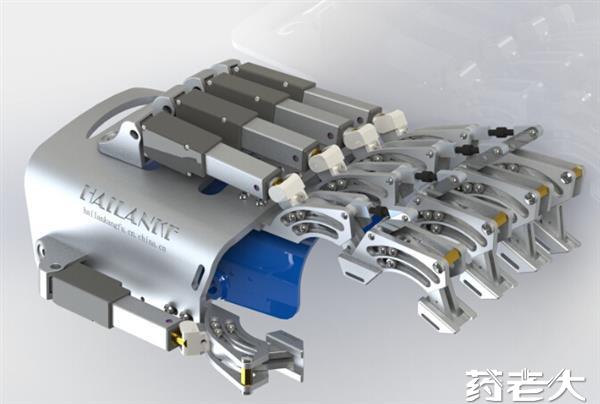
产品说明:背景是一种利用气动力学原理进行康复训练的设备。主要通过空气压力驱动,实现对手指、手腕等关节的被动训练,以降低肌张力、改善

产品说明:1、多模式电刺激:经皮电刺激、神经肌肉电刺激、小脑顶核电刺激、神经网络重建,肌电生物反馈;2、诊疗一体:表面肌电在时域和频

产品说明:适用于短缩和挛缩组织的牵伸,如肩关节周围炎和各种原因引起的关节炎(类风湿关节炎、骨关节炎、强直性脊柱炎);预防由于固定、

产品说明:康复治疗主要通过物理治疗、运动疗法、作业疗法以及传统的中医特色治疗、康复工程等治疗手段,可能地改善病、伤、残者的功能障碍

产品说明:盆底肌肉康复器是一种专门用于盆底肌肉康复的训练仪器,它适用于产后女性、尿失禁患者、盆腔器官脱垂患者等人群,盆底肌肉康复器

产品说明:康复治疗主要通过物理治疗、运动疗法、作业疗法以及传统的中医特色治疗、康复工程等治疗手段,可能地改善病、伤、残者的功能障碍

产品说明:泽普医疗振动训练系统(直立型)ZEPU-ZD1、振动加速器、技术参数说明(鲁械注准20222190725)1.振动方向:垂直;2.振动幅度:zui

产品说明:技术特点:1.安全设计:备有患者应急开关;2.自动补偿:当患者因位移造成牵引力实时值偏离设定值时,微电脑控制牵引主机立即自动